| 一、项目进展情况及取得成果 |
| 项目进展情况:按计划进行 |
| 主要研究阶段(起止时间) |
研究内容 |
完成情况 |
| 2020年7月至2021年3月 | 方案设计 | 完成 |
| 项目研究成果(已取得的成果) |
| 序号 |
项目成果名称 |
成果形式 |
| 1 | 方案设计报告 | 文档、图纸、程序 |
|
| |
| 二、项目中期报告 |
二、项目中期报告(项目执行的进展情况,取得了哪些成绩,是否达到预期效果,以及在项目的开展过程中还存在哪些问题。)
进展情况:
项目正在有序推进中,按照总进度的安排,目前已经完成了方案的评估和选择,并已经开始了底盘结构的具体设计,以下为项目汇报内容:
(一)底盘方案评估
我们对机器人的底盘模块进行了细致考虑,对足式底盘和各类轮式底盘进行了评估,并最终确定了使用舵轮底盘来作为机器人的底盘模块,主要理由如下:
1.足式底盘是科研研究的热点内容,其控制难度、对驱动力的要求很高,且足式底盘的运动机构设计相比轮式而言具有相当的复杂性(足式机器人的控制系统一般作为单独的课题进行设计和研究),因此不适合用于本项目
2.轮式底盘:采用各种轮结构实现运动,根据轮胎的类型主要可分为:全向轮底盘、麦轮底盘、舵轮底盘等,根据安装方式和使用轮胎的个数又可分为:三轮全向底盘、四轮全向底盘、正交底盘、正方形底盘、X型底盘、米字形底盘等等,轮式底盘种类丰富,具有结构紧凑、运动稳定可靠、运动精度高、价格经济、控制较为简单等优势,更加符合我们机器人的设计要求,故相比于足式底盘,轮式底盘是更佳的选择。
3.三种轮式底盘的分析、比对及方案选择:
(1)麦克纳姆轮底盘
优点:易于实现全方向移动、稳定性较好、承载能力强、抓地性强、可平行安装,较容易保证安装精度、团队对麦轮的使用控制有借鉴和实践。
缺点:轮子本身重量较重、由四轮的速度合成实现全向移动,横向移动时会损失一部分速度,运动效率不高,且无法在崎岖地形进行全向移动、滚子容易磨损。
(2)全向轮底盘
优点:易于实现全方向移动、不同的安装方式可实现结构的简化、可达到不同的需求。
缺点:全向轮无法平行安装、对安装的准确性较高,且承载能力较差。
(3)舵轮底盘
优点:准确性高、速度快。
缺点:速度和灵活性相比全向轮和麦轮更高,但需要单独的电机来控制实现转向,结构复杂,控制难度较高。
(4)底盘方案选择
三者均能够实现底盘的全向移动,且都有自身独特的优势,考虑到所设计的机器人需要达到高速度、高灵活性的要求,决定选择舵轮底盘作为机器人的底盘方案。

图 1-1 舵轮底盘
(二)踢球方案评估
根据比赛的需要,踢球机构需要完成将橄榄球踢出,使其射入球门
该模块设计的目的则是将橄榄球踢进球门。核心动作则是驱动执行机构将放在场地上的橄榄球击打进球门。基于此,将动作拆分为两个阶段,分别是加速阶段和复位阶段。
1.电机旋转踢球方案

图 2-1 电机
该方案基本原理为电机经过减速以后带动旋转臂加速踢球。加速过程有以下的对比:
|
方案原理
|
优点
|
缺点
|
|
整周旋转加速
|
加速过程稳定
|
由于橄榄球摆放位置固定,整周旋转加速不容易控制踢球时间,而且需要处理整周旋转所导致的线路缠绕问题
|
|
非整周旋转加速
|
加速度大,加速时间短
|
加速度大,在加速时可能会剧烈晃动,影响机构的稳定性
|
在机构设计中考虑到若踢球机构的模块尺寸过大,则容易与其他的功能机构发生干涉问题,所以选择此方案则仅考虑非整周旋转加速的原理。
2.气缸直推踢球方案

图 2-2 气缸
气缸直推结构较为简单,但由以上分析可知橄榄球踢出速度要达到10m/s以上,而标准的气缸直线速度为50~500mm/s。在一定气压工作的情况下,缸径和负载越大,则气缸杆的直线速度越小,需设计相应的增速机构,但由于竞赛机器人的尺寸限制,直线加速的行程过长则不符合竞赛要求,而且气缸在使用过程中会出现爬行的现象,影响踢球的稳定性。
3.弹簧蓄能踢球方案
拉伸弹簧其优点在于可以再极短时间内释放出非常大的能量,即其功率非常大,其缺点在于其工艺性的问题,普通弹簧的正常工作行程很小,即其能储存的能量不多,所以需要使用多根弹簧配合工作完成蓄能踢球任务。
4.摩擦轮踢球方案
使用一对摩擦轮,利用球面和摩擦轮之前的摩擦力,将球射出。
其优点在于:摩擦轮的重复性很好,且能够提供较大的推出力。
缺点在于:摩擦轮和球面的接触是一个曲面,不易计算所需转速,且必须保证球的入摩擦轮时的姿态是确定的,因此可能需要额外设计姿态纠正的机构,而橄榄球的纠正存在不确定性。
5.踢球方案选择
综上,基于经济成本以及能效等因素,选择弹簧蓄能踢橄榄球方案作为机械结构设计方案。
(三)踢球方案评估
由于比赛中需要获得球权后才能进行踢球任务,意味着获得球权后需要将橄榄球摆放到踢球区合适位置,进而完成踢球任务。完成这一过程规则中允许的方式有以下两种:
1.人工摆放橄榄球
2.机器自动摆放橄榄球
规则中明确了选择第一种方法的限制是当申请多个橄榄球时则需要同时摆放到场地内不同点,机器人需要将所有橄榄球踢完才能进行下一任务;而选择第二种方法则由机器人的设计特性,可以将橄榄球逐一放在同一个点完成踢球任务。
3.摆球方案选择
从上述可以看出两种方法的区别在于踢球点可以是多个或者一个,但考虑到比赛的对抗性质以及机器特性,选择第二种即机器自动摆放橄榄球对其重复性有更好的保证,所以目标是选择第二种方式进行设计完成这一任务。
(四)摆球原理评估
1.摆球原理分析
由于橄榄球本身体积较大,而设计目标是能够同时存放三个橄榄球和三个球座,所以总体摆球方案思路是从对象开始构思,设计合适的摆放结构。主要的原理有两种:
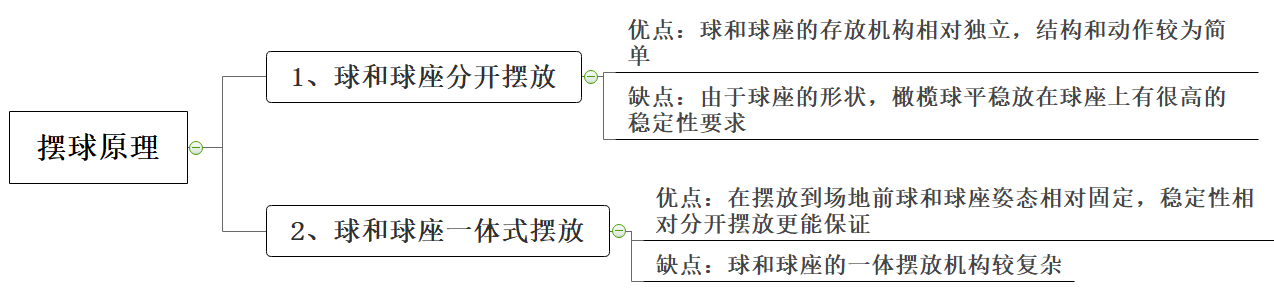
图 4-1 摆球原理图
2.摆球原理选择
由于摆球的稳定性对踢球的效果起到关键的影响作用,所以首要条件是保证稳定性。所以选择第二种原理进行设计。
(五)底盘结构设计
底盘模块主要是轮系结构的设计,将传统的万向轮系修改以后分成驱动结构和转向结构两部分
1.驱动结构
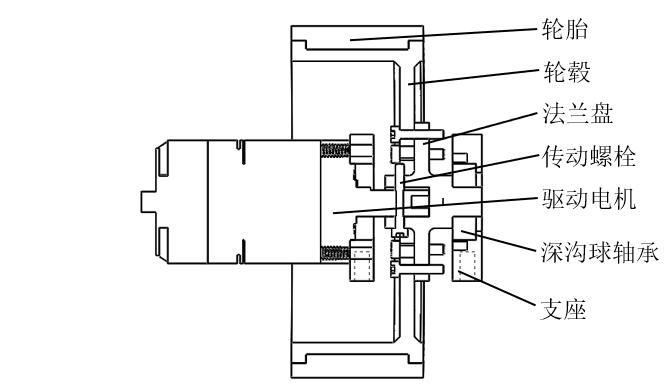 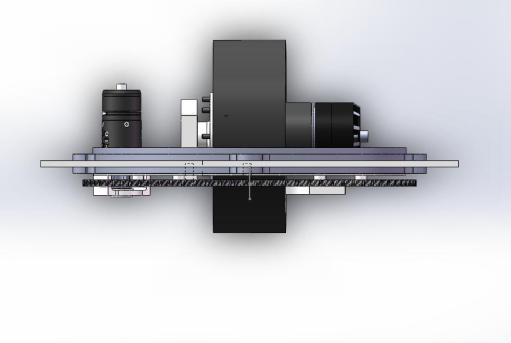
图5-1-1 驱动轴系结构 图5-1-2 三维结构图
如图5-1-1所示,电机经过自带的减速箱变速之后通过传动螺栓将扭矩和转速传递至与轮毂固定连连的法兰盘上,轴系采用双支点结构,加强结构刚度的同时降低了电机轴所受的径向载荷。
2.转向结构
转向结构方案有如下表
表 转向方案
|
传动形式
|
特点
|
|
齿轮传动
|
结构紧凑,传动比准确,效率高,功率范围广,但要求较高的安装精度,不适宜远距离传动
|
|
同步带传动
|
具有良好的挠性,能够缓冲吸震,需要张紧结构
|
|
链传动
|
安装精度要求低,传动平稳性较差
|
从上表比较可以知道,底盘轮系转向结构对底盘运动精度影响较大,且空间小,适宜采用齿轮传动。
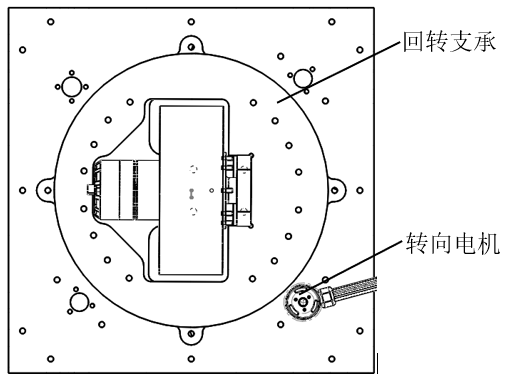 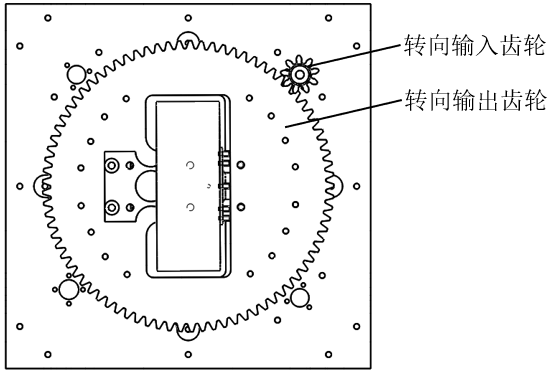
图5-2-1 轮系俯视图 图5-2-2 轮系仰视图
如图5-2-1所示,驱动结构整体通过支座安装在回转支承的活动端,回转支承的固定端则安装在底板上,实现了转向的自由度。如图5-2-2所示,大齿轮与回转支承的活动端通过螺栓固定连接,转向电机通过自带的减速箱后驱动小齿轮,完成轮子的转向功能。
常见的回转支承因为精度高,承载能力强,所以一般价格较贵。所以在初版决定自行设计简单的回转支承来完成功能测试。
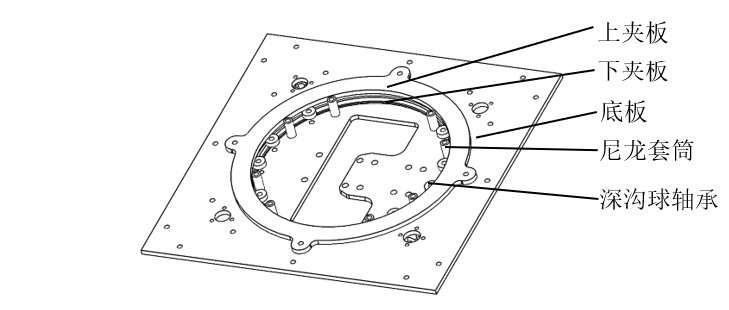
图5-2-3 回转支承结构
上、下夹板与底板通过螺栓固连,形成一圈滚道,深沟球轴承通过螺栓与上压板和大齿轮连接形成转动体,而尼龙套筒则实现了大齿轮与下夹板的轴向定位,在大齿轮与下夹板之间套了一圈钢柱作为滚动体以减小摩擦。
(六)项目研究存在的主要问题及应对措施
1.底盘的控制和设计缺少实验平台:
由于团队成员对舵轮底盘的接触比较少,因此在其设计和算法控制上需要进行较多学习工作,而实物底盘样机的设计制作需要较多时间和经济成本,因此底盘的设计和控制算法的验证不宜使用实物样机平台。
应对措施:
学习仿真软件,利用仿真软件搭建虚拟样机,在虚拟样机模型上进行算法和结构的仿真,以验证算法的有效性,节约学习时间和实验成本,仿真所得结果可以作用于底盘的设计以及电机的选型。
2.橄榄球的姿态问题:
橄榄球的摆放姿态会影响摆球的效率以及踢球的效率,因此必须橄榄球的摆放姿态进行详细的分析。
应对措施:
考虑橄榄球的所有可能的摆放方式,并寻找用于评估摆球效率和踢球效率的变量,从而再对橄榄球的所有姿态进行评估,最后选出最佳的橄榄球姿态。
|
|
| |
| 三、经费使用明细情况 |
| 项目获批总经费(元) |
已使用项目研究经费(元) |
已报销金额(元) |
未报销金额(元) |
| 20000 |
6000 |
0 |
6000 |
| 项目经费开支情况 |
| 名目 |
用途 |
金额(元) |
备注 |
| 论文版面费 |
|
|
|
| 专利申请费 |
|
|
|
| 调研、差旅费 |
|
|
|
| 打印、复印费 |
|
|
|
| 资料费 |
购买相关参考资料 |
1000 |
|
| 试剂等耗材费 |
购买碳板等用于加工底盘的材料 |
3000 |
|
| 元器件、软硬件测试、小型硬件购置费 |
购买电机和传感器 |
2000 |
|
| 其它 |
|
|
|
|
| |
| 四、项目后期具体工作计划 |
下阶段主要任务:
首先对球的摆放方式进行仔细考虑,确定球摆放时的姿态。寻找和学习仿真软件,利用仿真软件建立虚拟样机,以进行底盘结构设计以及控制算法的开发工作,同时,也对各大模块开展具体设计。
整个项目按以下计划表执行
|
时间
|
内容
|
|
2020年7月至2020年8月
|
需求分析
|
|
2020年8月至2020年9月
|
原理方案收集
|
|
2020年9月至2021年3月
|
方案评估及选择
|
|
2021年3月至2022年4月
|
方案结构具体设计、虚拟样机仿真实验、零件计算选型和校核、图纸绘制
|
|
制作、调试机器
|
|
2022年4月至2022年5月
|
编写设计说明书
|
|
|
| |
| 五、指导教师意见 |
 |
|
| |
|
|
| |